iRidi для Panasоnic PTZ
Набор инструментов для управления камерами Panasоniс.
документация обновлена 01.01.2024
iRidi для Panasоnic PTZ - это набор инструментов, позволяющий создать интерфейс для управления камерами Panasоnic.
Протестированное оборудование:
- AW-UE40WEJ.
Подключение
Подключение к оборудованию (IP-камеры с поддержкой протокола Panasоnic) по локальной сети. Взаимодействие с оборудованием происходит посредством HTTP запросов.
Работа в iRidi
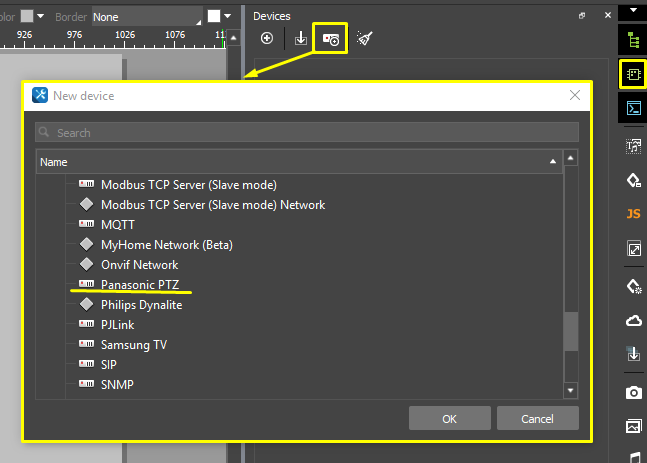
Создайте новый проект, на вкладке Devices добавьте драйвер Panasonic PTZ .
Настройка драйвера
Укажите настройки подключения драйвера:
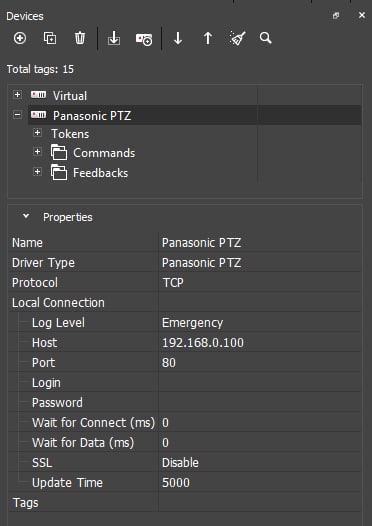
- Log Level - уровень логирования;
- Host - IP адрес камеры;
- Port - порт (по умолчанию 80);
- Login / Password - логин и пароль доступа к камере;
- Wait for Connect (ms) - время ожидания подключения;
- Wait for Data (ms) - время обратной связи от оборудования;
- SSL - тип шифрования;
- Update Time - частота опроса оборудования (мс.).
Настройка команд и фидбеков
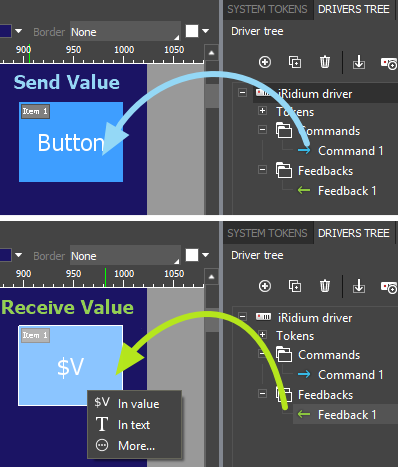
Для управления оборудованием настройте команды (Commands) и каналы обратной связи (Feedbacks). Чтобы отправить команду, перетяните ее на графический элемент и укажите значение (Value), которое необходимо отправить. Чтобы отобразить значение с канала обратной связи, перетащите Feedback на графический элемент, и укажите, каким образом вывести значение (Value).
Подробнее о работе с графическими элементами написано в статье "Типы графических элементов".
Commands
Команда привязывается к графическому элементу с указанием значения, которое нужно передать в шину при нажатии на графический элемент. При добавлении драйвера все команды создаются автоматически и не требуют дополнительной настройки.
Координаты и направления указаны для потолочного монтажа камеры.
| Параметр | Значение | Описание |
|---|---|---|
| Power | 0/1 | Питание Standby/Power On |
| Absolute Position Set | Любое значение | Передать координаты, на которые повернуть камеру (0/0 правый верхний угол) |
| Absolute Position Pan | 0 32 768 65 535 | Минимальные координаты панорамы Центр Максимальные координаты панорамы |
| Absolute Position Tilt | 0 32 768 65 535 | Минимальные координаты наклона Центр Максимальные координаты наклона |
| Relative Position Set | Любое значение | Передать координаты шага из Relative Position Pan/Tilt на оборудование |
| Relative Position Pan | 0 32 768 65 535 | Минимальное значение шага панорамы вправо Центр Максимальное значение шага панорамы влево |
| Relative Position Tilt | 0 32 768 65 535 | Минимальное значение шага наклона (верх) Центр Максимальное значение шага наклона (низ) |
| Continious Movement Set | Любое значение | Передать значение перемещения из Continious Movement Pan/Tilt на оборудование |
| Continious Movement Pan | 01–49 50 51–99 | Скорость перемещения камеры влево, где 01 — макс. скорость Остановить перемещение Скорость перемещения камеры вправо, где 99 — макс. скорость |
| Continious Movement Tilt | 01–49 50 51–99 | Скорость перемещения камеры вверх, где 01 — макс. скорость Остановить зуммирование Скорость перемещения камеры вниз, где 99 — макс. скорость |
| Stop | Любое значение | Отправляет команду камере остановиться |
| Go Home | Любое значение | Центрует камеру (координаты 32 768/32 768) |
| Zoom Position | 1 365–4 095 | Позиция приближения |
| Zoom | 01–49 50 51–99 | Скорость отдаления, где 01 — макс. скорость Остановить зуммирование Скорость приближения, где 99 — макс. скорость |
| Zoom Stop | Любое значение | Остановить приближение |
| Preset Register | 0–99 | Сохранение текущего положения с указанием номера пресета |
| Preset Playback | 0–99 | Вызов положения, сохранённого в пресете |
Feedbacks
Канал обратной связи привязывается к графическому элементу, чтобы отобразить состояние оборудования в шине. При добавлении драйвера все каналы обратной связи создаются автоматически и не требуют дополнительной настройки.
| Параметр | Значение | Описание |
|---|---|---|
| Power | 0/1 | Состояние питания Standby/Power On |
| Absolute Position Pan | 0 32 768 65 535 | Минимальные координаты панорамы Центр Максимальные координаты панорамы |
| Absolute Position Tilt | 0 32 768 65 535 | Минимальные координаты наклона Центр Максимальные координаты наклона |
| Relative Position Pan | 0 32 768 65 535 | Минимальное значение шага панорамы Центр Максимальное значение шага панорамы |
| Relative Position Tilt | 0 32 768 65 535 | Минимальное значение шага наклона Центр Максимальное значение шага наклона |
| Continious Movement Pan | 0 32 768 65 535 | Минимальное значение движения панорамы Центр Максимальное значение движения панорамы |
| Continious Movement Tilt | 0 32 768 65 535 | Минимальное значение движения наклона Центр Максимальное значение движения наклона |
| Zoom Position | 1 365–4 095 | Позиция зуммирования |
Relative Position
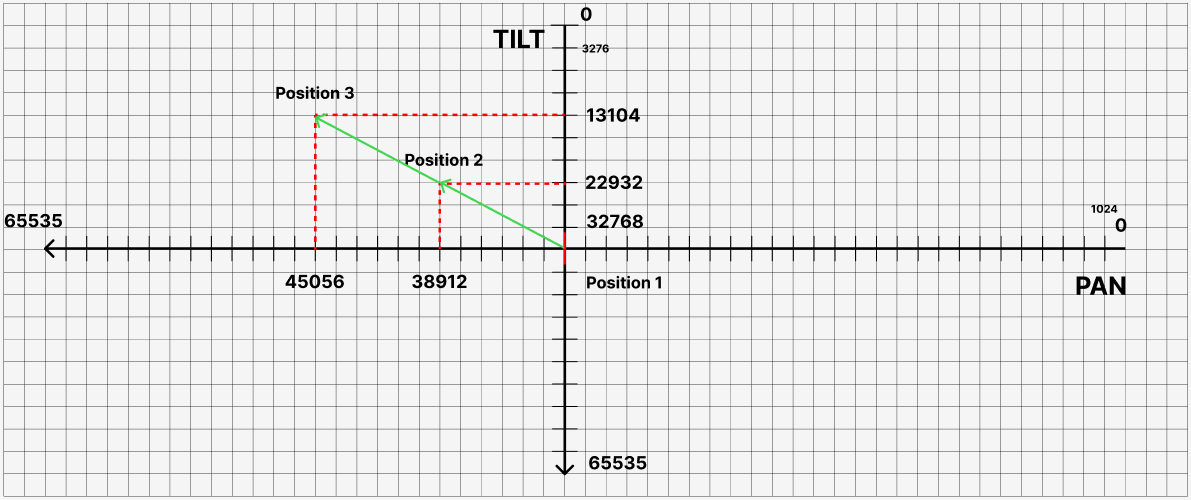
Сместить камеру на значение Relative Position от текущей позиции. Область отображения можно представить как график функции. Началом отсчёта для PAN и TILT является 32768, Relative Position задается как шаг для камеры, где начальная точка не меняется.
Важно: сначала задаются обе координаты и только потом отправляются на оборудование, таким образом сначала задается значение Relative Position Pan и Relative Position Tilt, после чего отправляется команда Relative Position Set с любым значением для применения заданных координат.
В примере шаг делает смещение камеры на 6144 влево (PAN) и на 9836 вверх (TILT):
- Position 1 - 32768 / 32768 (PAN/ TILT),
- Position 2 - 32768 + 6144 = 38912 (PAN) / 32768 - 8736 = 22932 (TILT),
- Position 3 - 38912 + 6144 = 45056 (PAN) / 22932 - 8736 = 13104 (TILT).
Одинаковый шаг прибавляет значение к текущей координате, смещая на одно и тоже значение.
Position 1 - Начальная точка камеры
- Pan - 0 (панорама) Tilt - 32768 (наклон)
Position 2 - Позиция камеры после применения шага (Relative Position Set)
- Relative Position Pan - 38912 (панорама)
- Relative Position Tilt - 22932 (наклон)
- Relative Position Set - any
Position 3 - Позиция камеры после применения шага x2 (Relative Position Set)
- Relative Position Pan - 45056 (панорама)
- Relative Position Tilt - 13104 (наклон)
- Relative Position Set - any
Absolute Position
Установить позицию камеры. Область отображения можно представить как график функции, где позиция камеры задаётся двумя координатами PAN и TILT.
Важно: сначала задаются обе координаты и только потом отправляются на оборудование, таким образом сначала задается значение Absolute Position Pan и Absolute Position Tilt, после чего отправляется команда Absolute Position Set с любым значением для применения заданных координат.
Рекомендуется использовать действие по Release.
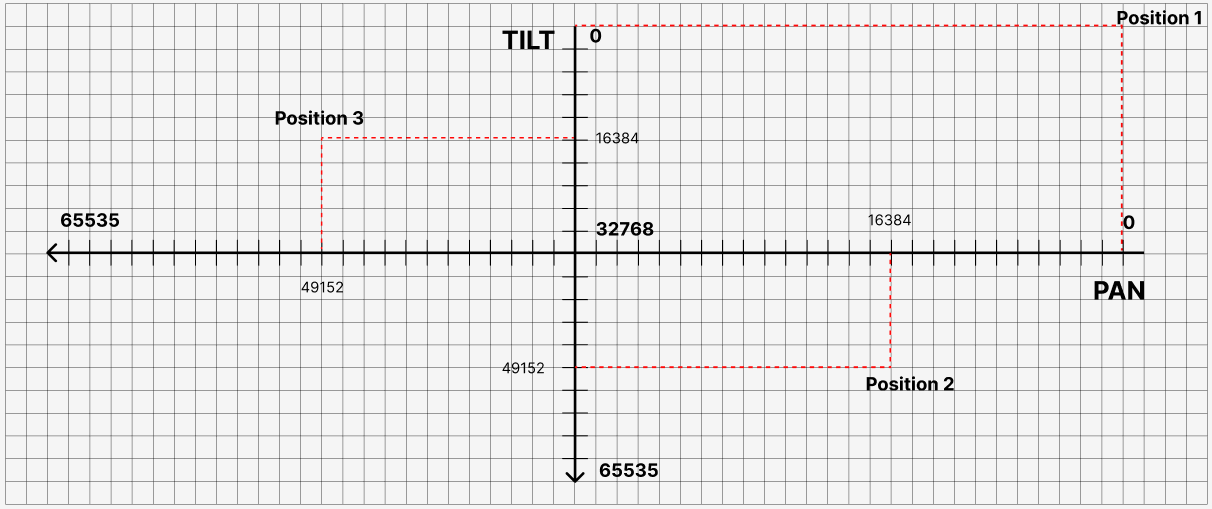
Position 1 - установка позиции камеры на верхний правый угол доступного диапазона Задаем координату для панорамы (0) и координату наклона (0), после чего передаем запрос камере
- Absolute Position Pan - 0 (панорама)
- Absolute Position Tilt - 0 (наклон)
- Absolute Position Set - any
Position 2 - установить камеру ниже (на 75%) и левее ( на 25%) Задаем координату для панорамы (16384) и координату наклона (16384), поcле чего передаем запрос камере
- Absolute Position Pan - 16384 (панорама)
- Absolute Position Tilt - 49152 (наклон)
- Absolute Position Set - any
Position 3 - установить камеру ниже (на 25%) и левее ( на 75%) Задаем координату для панорамы (16384) и координату наклона (16384), после чего передаем запрос камере
- Absolute Position Pan - 49152 (панорама)
- Absolute Position Tilt - 16384 (наклон)
- Absolute Position Set - any
Continious Movement
Область отображения можно представить как график функции, в котором задается скорость движения в определённом направлении для PAN и TILT. 50 является точкой остановки камеры и минимальным значением для скорости движения в направлении PAN и TILT.
Важно: сначала задается скорость движение в определенном направлении для PAN и TILT и только потом отправляются на оборудование, таким образом сначала задается значение Continious Movement Pan и/или Continious Movement Tilt, после чего отправляется команда Continious Movement Set с любым значением для применения заданных значений. Для остановки движения отправляется значение 50 для PAN и/или TILT и команда Continuous Movement Set с любым значением.
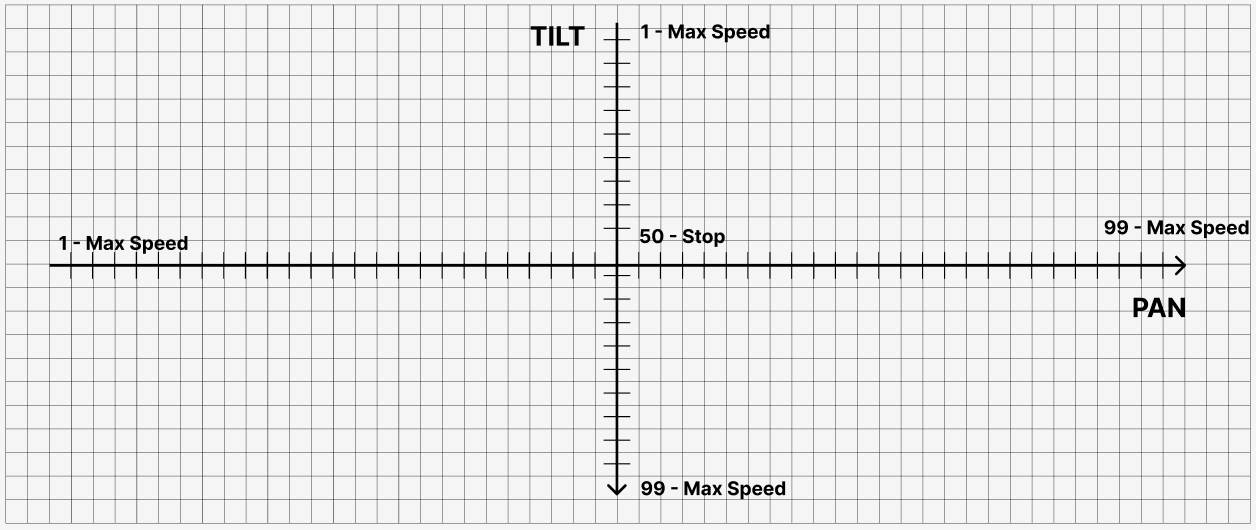
PAN = 1 - Камера начнёт движение влево с максимальной скоростью
PAN = 49 - Камера начнёт движение влево с минимальной скоростью
PAN = 51 - Камера начнёт движение вправо с минимальной скоростью
PAN = 99 - Камера начнёт движение вправо с максимальной скоростью
TILT = 1 - Камера начнёт движение вниз с максимальной скоростью
TILT = 49 - Камера начнёт движение вниз с минимальной скоростью
TILT = 51 - Камера начнёт движение вверх с минимальной скоростью
TILT = 99 - Камера начнёт движение вверх с максимальной скоростью
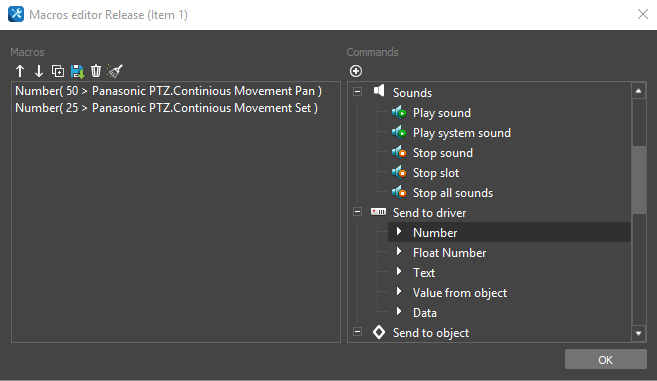
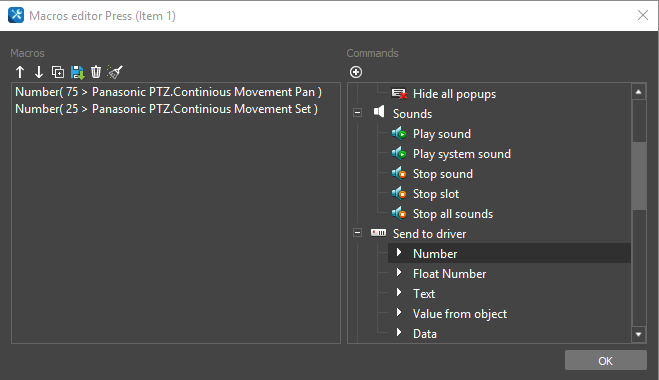
Пример для кнопки Вправо на Джойстике в интерфейсе:
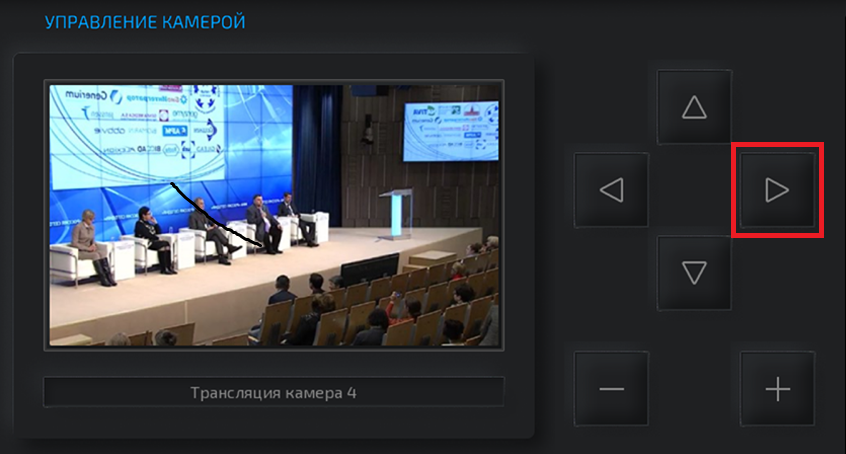
- По нажатию (Press) задается средняя скорость движения вправо (PAN = 75), что соответствует командам:
- По отпусканию (Release) задается остановка камеры (PAN = 50), что соответствует командам: